Humanoid robots are designed to operate in spaces built for humans—walking on two legs, manipulating everyday objects, and collaborating safely with people. Achieving this level of capability depends not only on advanced algorithms, but fundamentally on high-quality data.
From perception and locomotion to manipulation and decision-making, every intelligent behavior a humanoid robot exhibits is learned, validated, or refined through data. In this article, we explore the core data collection methods used in modern humanoid robotics and how they come together to build robust, general-purpose robot intelligence.
Why Data Matters for Humanoid Robots
Unlike industrial robots operating in structured environments, humanoid robots face:
-
Highly unstructured and dynamic scenes
-
Diverse object shapes, materials, and affordances
-
Continuous contact with humans and the physical world
-
Complex full-body coordination and balance
To handle this complexity, humanoid robots rely on large-scale, multimodal datasets that capture vision, motion, force, intent, and outcomes across a wide range of tasks and environments.
On-Robot Sensor Data Collection
The most fundamental source of data comes directly from sensors embedded in the robot itself.
Typical on-robot data streams include:
-
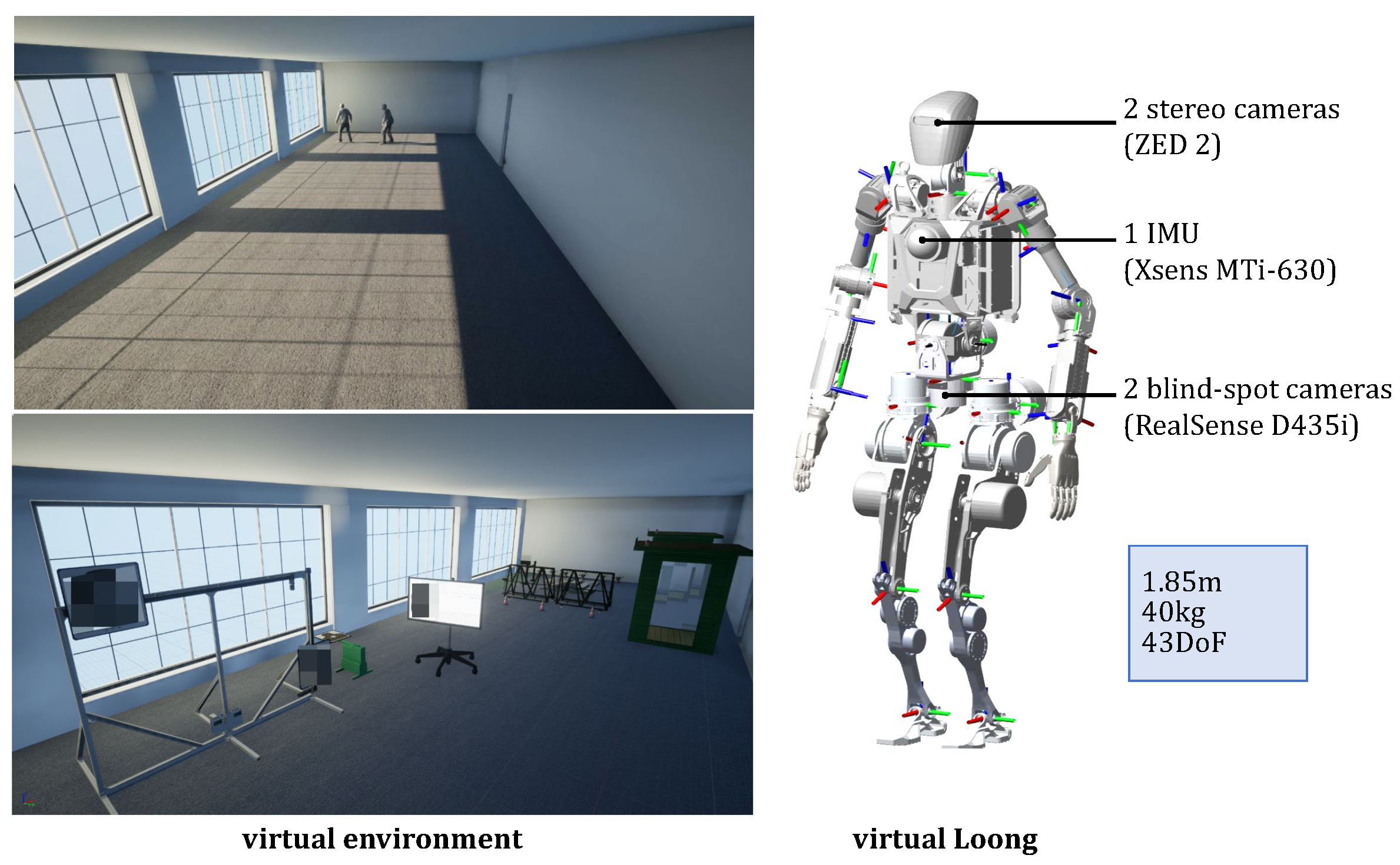
Vision: RGB and depth cameras for scene understanding and object perception
-
Proprioception: joint encoders and IMUs for body state, balance, and motion control
-
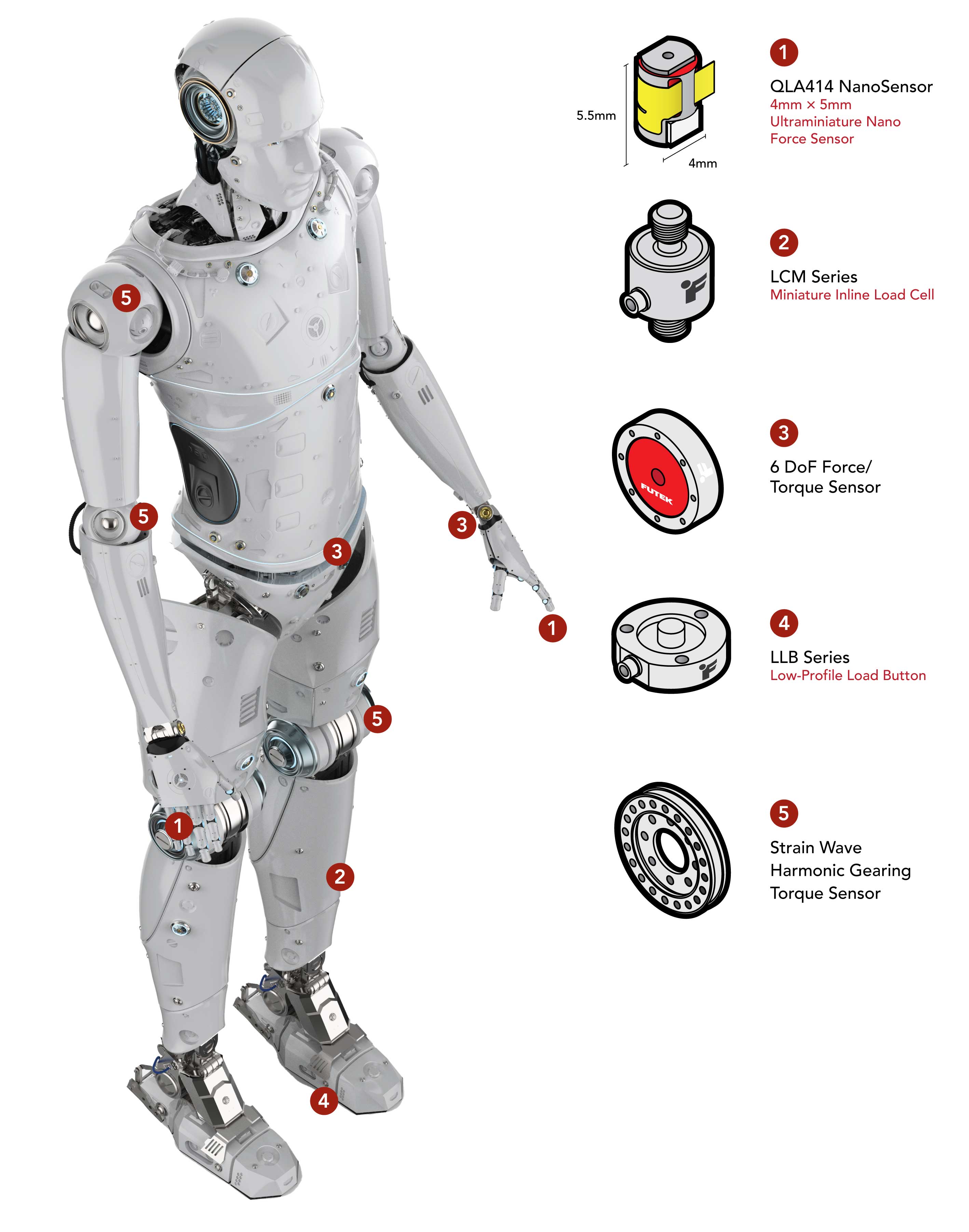
Force & contact: foot pressure sensors, torque sensors, and tactile sensors for interaction feedback

This data is continuously logged during operation and forms the backbone of:
-
State estimation
-
Locomotion control
-
Manipulation feedback loops
-
Safety monitoring
High-frequency, time-synchronized sensor data is essential for training control policies and validating real-world performance.
Human Demonstration and Teleoperation Data

Humanoid robots often learn directly from humans.
Two common approaches are:
-
Motion capture: Recording full-body human movements using mocap suits or marker-based systems to capture natural walking, reaching, and manipulation behaviors.
-
Teleoperation: Humans control the robot directly (via VR, exoskeletons, or leader-follower devices), generating high-quality demonstrations in real environments.
This data is especially valuable for:
-
Imitation learning
-
Vision-Language-Action (VLA) model training
-
Capturing human intent and task strategies
Human demonstrations help robots learn how tasks should be performed, not just whether they succeed.
Simulation-Based Data Generation

Simulation plays a critical role in scaling data collection.
In high-fidelity simulators:
-
Thousands of task variations can be executed safely and in parallel
-
Sensors, actions, and ground truth are automatically labeled
-
Rare or dangerous failure cases can be explored without risk
Simulation data is commonly used for:
-
Reinforcement learning
-
Pre-training perception and control models
-
Stress-testing policies before real-world deployment
When combined with real-world fine-tuning, simulation enables efficient sim-to-real transfer.
Autonomous Exploration and Continuous Logging
Once deployed, humanoid robots continue to collect data autonomously.
This includes:
-
Navigation trajectories and recovery behaviors
-
Manipulation successes and failures
-
Environmental changes and long-tail edge cases
Continuous logging creates a feedback loop where real-world experience feeds back into:
-
Model retraining
-
Policy refinement
-
Safety and reliability improvements
Over time, this transforms deployed robots into self-improving systems.
Annotation and Dataset Curation
Raw data only becomes useful when properly curated.
Key steps include:
-
Time synchronization and calibration
-
Automated validation and quality checks
-
Annotation of objects, actions, task outcomes, and failure modes
Depending on complexity, annotation may be:
-
Automated (in simulation or via heuristics)
-
Crowdsourced for scalable visual labeling
-
Expert-driven for safety-critical or complex behaviors
A well-designed data pipeline ensures consistency, traceability, and long-term usability of datasets.
Bringing It All Together: A Unified Data Pipeline
Modern humanoid robot development relies on hybrid data pipelines that combine:
-
Real sensor data from physical robots
-
Human demonstrations and teleoperation
-
Large-scale simulated experience
-
Continuous deployment feedback
The result is a diverse, multimodal dataset capable of supporting perception, locomotion, manipulation, and high-level decision-making within a single integrated system.
Conclusion
Data is the foundation of humanoid robot intelligence.
As humanoid robots move from research labs into real-world environments, the ability to collect, manage, and learn from large-scale, high-quality data will define their success. By combining sensor-rich robots, human demonstrations, simulation, and continuous learning pipelines, we can build humanoids that are not only capable—but adaptable, safe, and truly useful in human spaces.
